Radostina Calovska
Bulgarian Air Force Academy „Georgi Benkovski“ – Dolna Mitropolia, Bulgaria
Stefan Biliderov
Bulgarian Air Force Academy „Georgi Benkovski“ – Dolna Mitropolia, Bulgaria
https://doi.org/10.53656/adpe-2025.10
Pages 109-122
Abstract. Researching the possibilities of controlling different mechatronic systems with elements of artificial intelligence expands their potential application in different spheres of the human life. In the presented material, an algorithm for building an artificial neural network (ANN) has been synthesized, which is used in controlling the longitudinal motion of an unmanned aerial vehicle (UAV).
Keywords: Unmanned Aerial Vehicle (UAV); Longitudinal Motion; Fuzzy Interference System (FIS) Artificial Neural Network (ANN)
- Introduction
The fast developed of the computer technologies and the increasing interest in applying artificial intelligence (AI) across various aspects of daily life serve as a basis for exploring the potential integration of AI elements into the control of different mechatronic systems. Synthesizing complex mathematical models for control of any physical systems requires a large amount of time, as well as specialists with expert knowledge in different scientific directions. The use of ANN for autonomous control is a prerequisite for replacing traditional controllers with faster and more adaptive intelligent systems based on the human brain and knowledge. This would lead to the realization of fully autonomous mechatronic devices that are more flexible in reconfiguration and can perform multiple tasks with less computing power. Artificial neural networks are widely used in the automotive and transportation industries, industrial process control, medical sciences, aerospace, robotics, computer vision, pattern recognition, and engineering sciences (mechanics, electronics, telecommunications, etc.).
The aim is to synthesis, training and analyzing the performance of an artificial neural network (ANN) for controlling the longitudinal motion of an unmanned aerial vehicle. New technologies in the development of mechatronic products (Nikolov et al., 2022) and in particular in UAVs are based on 3D printing. These processes, characteristic of Industry 4.0, build on existing mechanical technologies (Totev et al., 2024). Neural classifiers can also be used for monitoring agricultural crops (Draganova et al., 2010). Classical regulators are now being replaced by nonlinear fuzzy PID regulators (Petrov et al., 2002).
- Analysis of the use of neural networks in UAV control
One of the possible applications of UAV’s is the real-time detection of objects for the purpose of surveillance, reconnaissance, search and rescue, and inspection of existing infrastructure. In recent years, artificial neural networks (ANNs) have become a standard tool for solving such tasks (Boudjit et al., 2018), as well as others in the field of computer vision (e.g. visual control when controlling a quadcopter that is chasing a target). The design of an ANN-based UAV controller is under consideration by many manufacturers. An example of such a controller applicable to tactical missiles, UAVs, unmanned helicopters and copters with dynamic ANN inversion via online inversion error compensation is shown in (Xin & Chen, 2017).
This controller performs dynamic stabilization of the closed loop system caused by disturbances of different nature. Another controller based on ANN is shown in (Bakshi & Ramachandran, 2016). An adaptive control scheme is used to track the trajectory under dynamic variation of modeled thrust coefficients, etc. A study has also been made on the performance and evaluation of high angle of attack (AoA) of traditional fixed-wing unmanned aerial vehicles (UAV) and of fixed-wing vertical take-off and landing (VTOL) UAVs using the ANN apparatus. (Tianchun et al., 2023).
Flight control algorithms have been developed with an artificial neural network based on data from experiments in wind tunnels and data from sensors installed on board the UAV, shown in (Araujo-Estrada & Windsor, 2020). The ANN is trained to response of a conventional controller, with a similar level of performance over a wide range of AoA and wind speed. The work (Patel et al., 2019) uses a conventional controller supported by an artificial neural network (ANN) to control fast and maneuverable UAVs at speeds up to 20 m/s. This is done to ensure flight safety and address issues related to unmodeled dynamics and operational uncertainty.
Direct Inverse Control using Artificial Neural Networks (DIC-ANN) has been shown to provide superior flight altitude control compared to traditional PID controllers. Studies indicate that DIC-ANN achieves better performance in managing the altitude dynamics of UAVs than the PID control method. (Muliadi & Kusumoputro, 2018). A comparative method for evaluating the effectiveness of direct feedback control of artificial neural network (DIC-ANN) with PID control system is proposed. Thus, the limitation of PID tuning is overcome. The use of Model Base Design (MBD) for controller development in the modern world is widely used, especially in UAV. In this case, there is a great reliance on the correctness of the mathematical model, and its complexity (Gu et al., 2020). These two challenges can be overcome by ANNs, which have unique characteristics and advantages in system identification and controller design.
The analysis shows that the integration of ANN into UAVs is a key technological advancement that enables higher autonomy, adaptability and efficiency. The main advantages include automatic navigation, object recognition, flight optimization and adaptability to the environment. Despite challenges such as computational limitations and energy efficiency, advances in hardware and software make it possible to control unmanned systems more intelligently. This technology finds wide application in military, agricultural, industrial and rescue activities, and future developments will lead to even greater autonomy and efficiency of drones.
The main advantage of the ANN is that it does not require mathematical knowledge for the operation of the entire mechatronic system. For training the ANN, only input and output data are required. Based on this data, the perceptron network undergoes a process of training and building connections between the input and output data.
The larger the data set the system is trained with and depending on the number of training iterations, the value of the regression curve approaches 1, which characterizes successful training.
- Synthesize of ANN for controlling UAV longitudinal motion
For the purposes of the task, a UAV developed in the XFLR5 aerodynamic research software platform is used. The task itself is presented in Fig. 1.
This figure shows a UAV researched in a virtual wind tunnel to obtain results related to its stability and controllability. The experiments establish the static and dynamic stability of the UAV and its control capabilities.
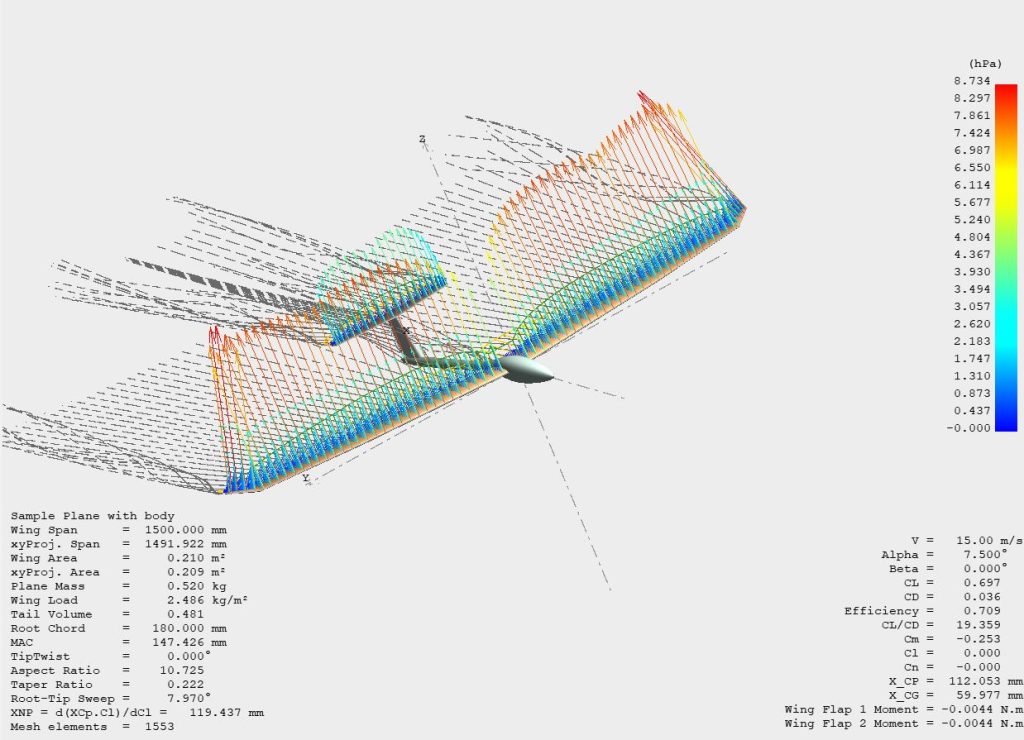
Figure 1. Experimental setup used for the UAV study
From Fig. 2 it can be seen that the UAV is statically stable in its longitudinal motion, due to the fact that the coefficient of the longitudinal pitch moment as a function of the angle of attack ![]() decreases with its increase.
decreases with its increase.
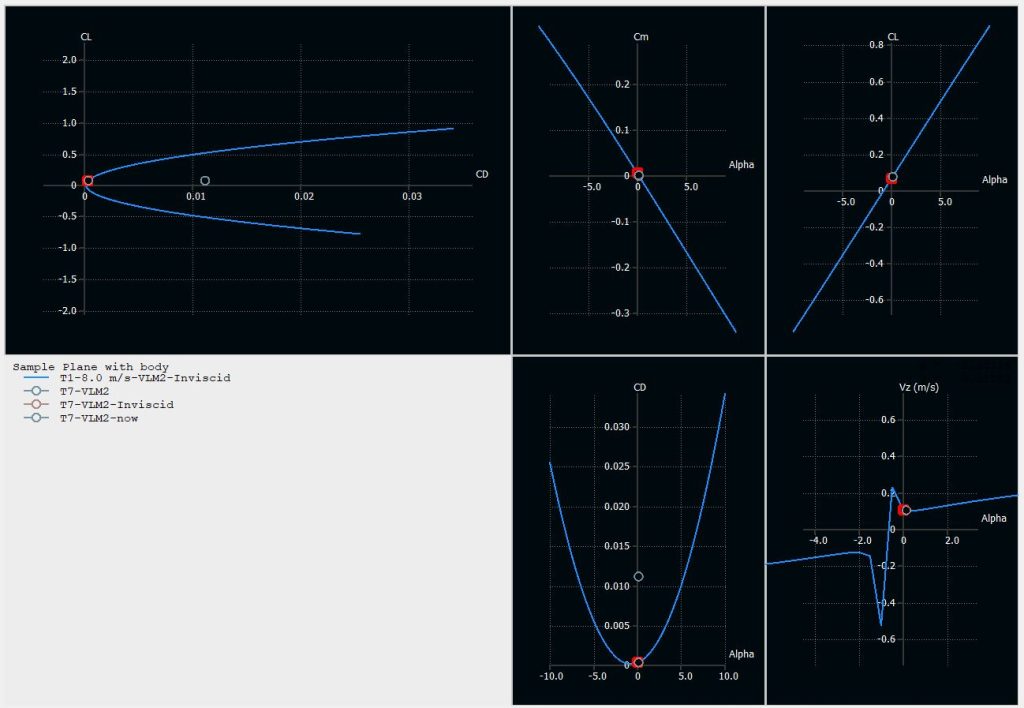
Figure 2. UAV research analysis results for the UAV
The convenience of the XFLR5 software product is that it is possible to obtain the state and control derivative matrices for the state space of the UAV. Expression (1) shows the specific values for these matrices for the selected UAV.
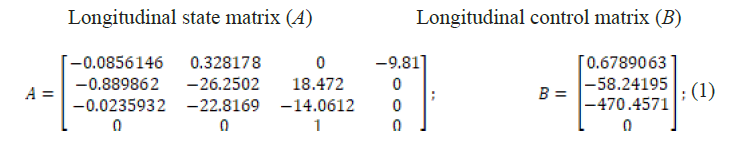
The state matrices are complemented with the observation and direct dependency matrices (2) to obtain the full state space in the longitudinal channel of the UAV.

The main results of this study are shown in (Calovska et al., 2024). These results are used to build array vectors of input and output data for ANN training. It was decided to use data from the Fuzzy Interference System (FIS) Controller for ANN training. The data are structured into the arrays through simulations in the MATLAB-Simulink environment. Fig. 3 shows the modeled mechatronic system, which data from the control of the longitudinal motion of the UAV were obtained.
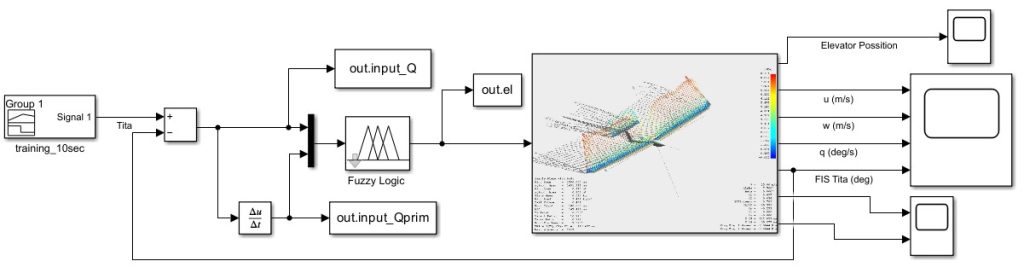
Figure 3. Schematic of the mechatronic data acquisition system
For the purposes of this study, using built-in functions of the MATLAB scripting language, a code was synthesized to determine the parameters of the ANN and its type (Feed-Forward Neural Network). The input and target output data were defined based on those obtained from the model operation in the MATLAB-Simulink environment for the longitudinal motion of a UAV controlled by a fuzzy logic controller (Fig. 3). These data are used to train the ANN.
The range for entering the minimum and maximum training values is determined, which should be within the total input data. In addition, the developed script, based on the number of data sets, determines the number of neurons for the input and output layers, while the number of hidden layers and the neurons in them are selected so that the ANN is sufficiently sensitive and with the necessary raster. This number has been established experimentally.
For the implementation of the specific task, the input neurons are chosen to be two, respectively input for the data sets for the control error (delta Q) and input for the direction of this error (Q prim). The hidden layers are chosen experimentally to be two, based on the training/time ratio. The first hidden layer has seven neurons, and the second hidden layer has five neurons.
The number of neurons in the output layer is one, determined by the data set for the position of the rudder (elevator_pissition) for controlling the longitudinal movement of the UAV.
ANN is considered to be successfully trained if the regression value is greater than 0,9. Each of the hidden neural layers is activated by a selected nonlinear activation function. The activation functions used for the ANN operation in the MATLAB environment are respectively: for layers one and two sigmoidal – Logistic Sigmoid (Fig. 4(a)); for layer three tangential – Hyperbolic Tangent Sigmoid (Fig. 4(b)); for the output layer a linear activation function – and Linear transfer function (Fig. 4(c)) were used.
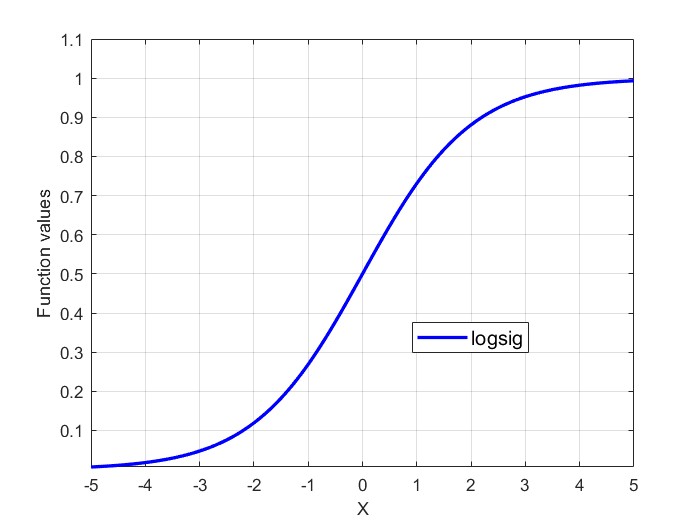
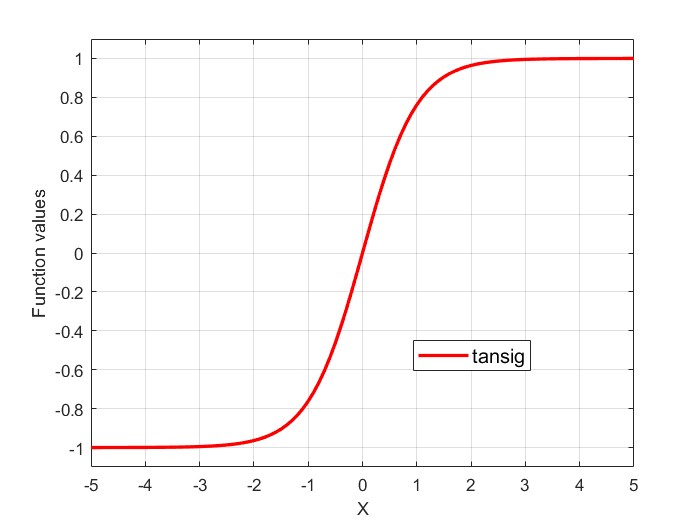
(а) (b) (с)
Figure 4. Activation function of the neuron: (а) Logistic Sigmoid (logsig); (b) Hyperbolic Tangent Sigmoid (tansig); (с) Linear transfer function (purelin)
The algorithms for implementing the above activation functions are detailed describe in (3), (4) and (5).
![]()
(3)
![]()
(4)
![]()
(5)
Х represents an input signal to the neuron, which is calculated as a linear combination of the input data and the neuron’s weights, plus the constant bias for regulating the neuron.
![]()
(6)
The Levenderg-Marquardt Backpropagation algorithm was used to train the network, which adjusts the weights to reduce the difference between the predicted and actual values and provides fast results. This method gives some of the best results when training ANNs.
To perform the task, an ANN is initialized, an arbitrary number of iterations for its training is set, a threshold limit (Stopping criterion based on error goal) is determined, which is usually chosen to be up to four or more decimal places, and ANN training is performed based on the input and output data related to the dynamics of the longitudinal motion of the UAV. Fig. 5 shows the graphical architecture of the synthesized ANN, and Fig. 6 shows its diagram in the MATLAB environment.
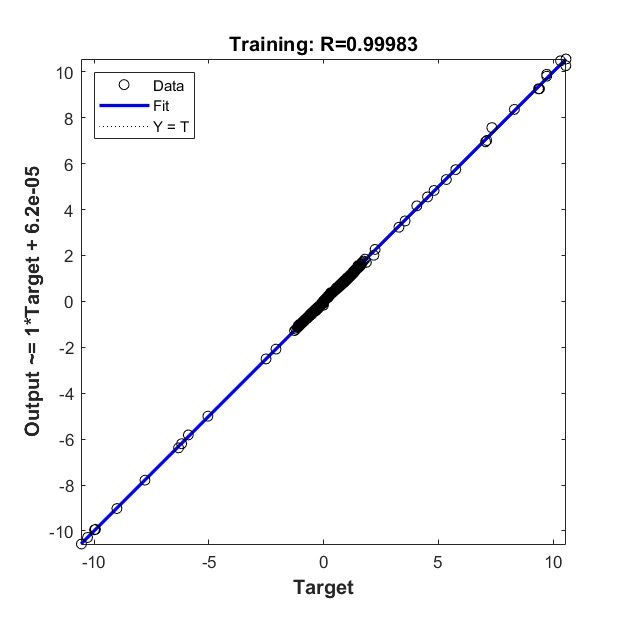
From the analysis of the results after training the artificial neural network, shown in Fig.7(a), it is seen that the regression value is close enough to unity, which is the main criterion for determining the training as successful.
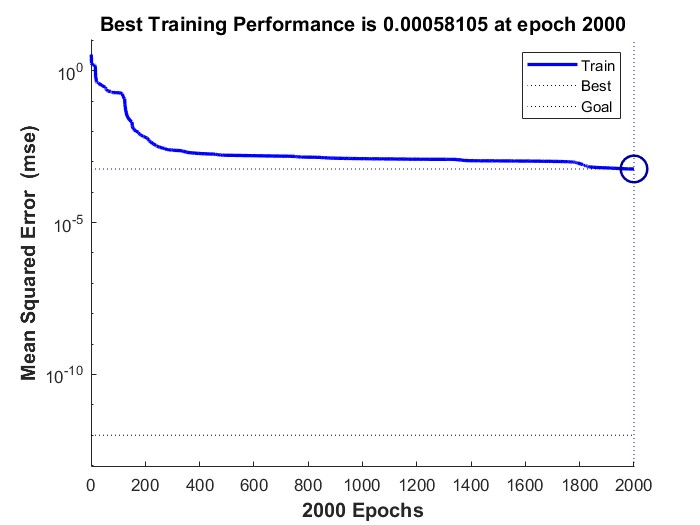
Fig.7(b) shows the change in the graph of the mean squared error curve between the desired target and the response of the neural network during training. Adjustment of the weights of the individual connections continues until the set threshold is reached.
Testing an ANN is entirely dependent on the input-output data used for training. If the test is with values that are not used in training, the ANN may give the wrong result. It is necessary to include the maximum and minimum input ranges in the training for a specific problem. When training an ANN, it is possible to take higher values as maximums, ensuring correct operation of the system.
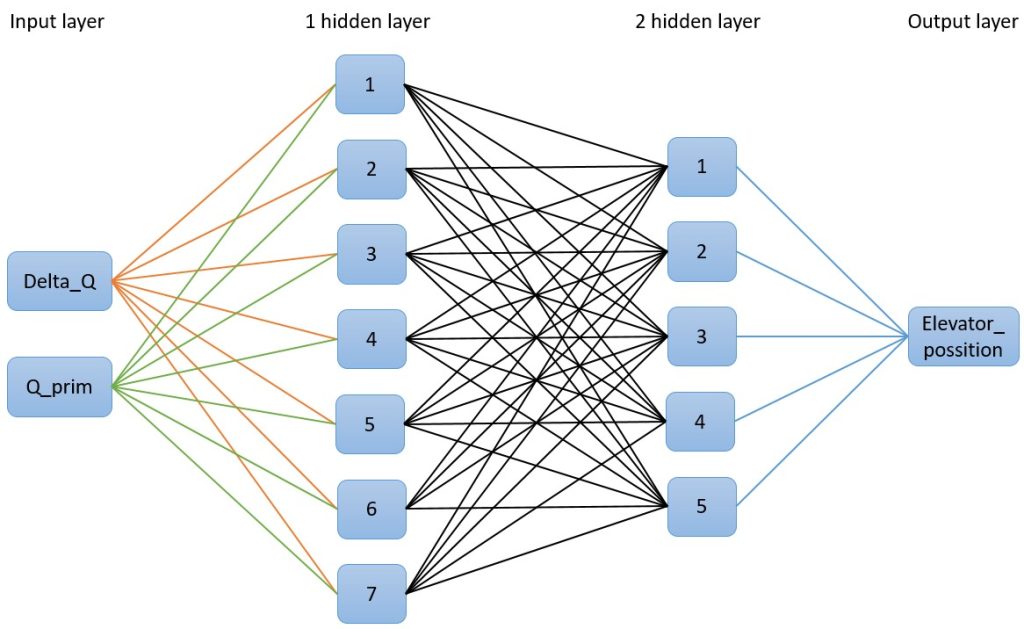
Figure 5. Graphical architecture of the synthesized ANN
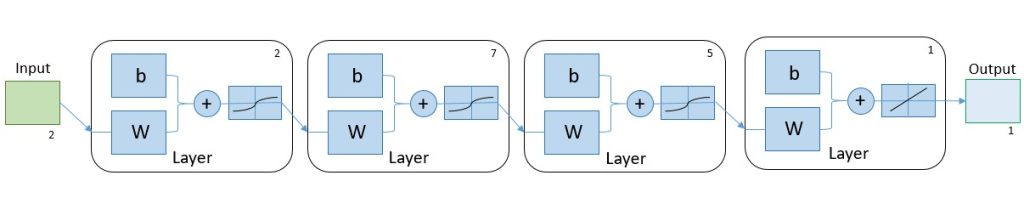
Figure 6. MATLAB diagram of the synthesized ANN
(а) (b)
Figure 7. Analysis of the training results of ANN: (a) regression value; (b) performance
- Study of the performance of the synthesized ANN in controlling the longitudinal motion of an autonomous UAV
Fig. 8 shows the structural scheme used to evaluate the effectiveness of the ANN in controlling the longitudinal motion of the UAV. The analysis uses the function “genism”, which is built into the MATLAB, and allows the ANN to be visualized and integrated as a standalone functional block within the Simulink environment. The structural layout of the resulting ANN block diagram is illustrated in Figure 9.
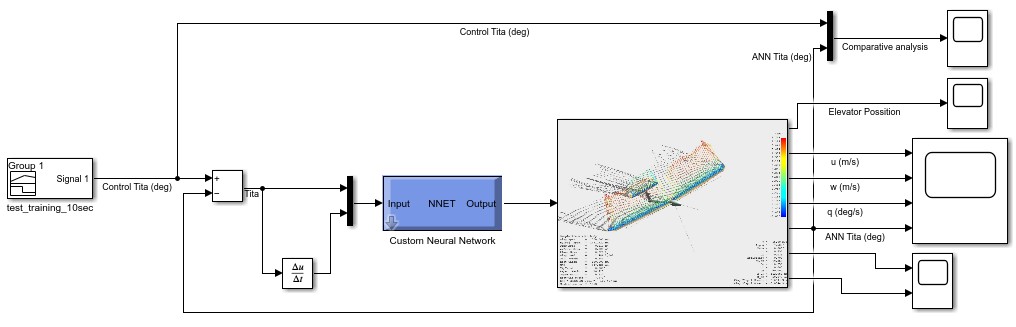
Figure 8. Scheme of research on control of longitudinal movement of UAV using an ANN
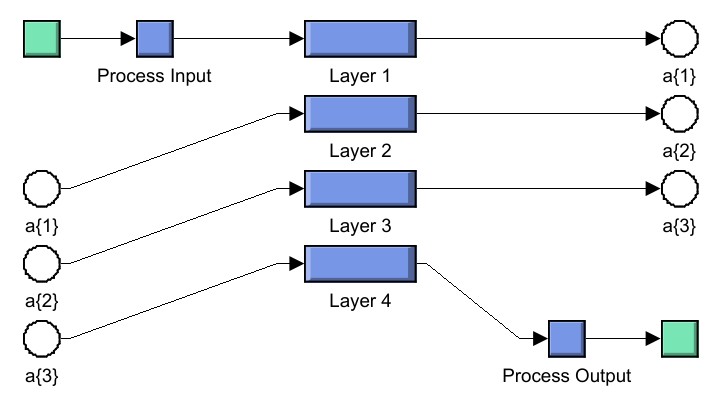
Figure 9. Block representation of ANN in Simulink
Test simulations were performed to verify and analyze the performance of the trained artificial neural network compared to a desired input signal, and to validate the results with that of the controller with FIS. Fig. 10 shows the results of a simulation in the Simulink environment when setting a desired pitch angle Θ. It can be seen that the control signal is relatively equal to the set desired angle for controlling the longitudinal movement of the unmanned aerial vehicle, and the absolute error ![]() between the desired and current pitch angle values is shown in Fig. 11.
between the desired and current pitch angle values is shown in Fig. 11.
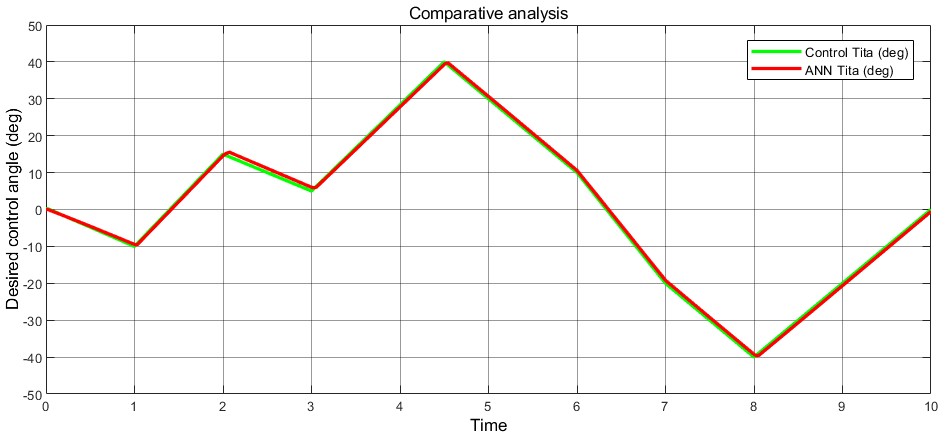
Figure 10. Analysis of the control signal versus the training signal
Checking the adequacy of a neural network for a longer period of time and with different signals proves that the ANN works well.
Fig. 12 shows the results of a simulation with a signal other than the trainer for a period of 60 seconds. Fig. 13 shows the absolute error when validating the operation of the ANN during longer operation. To validate the results, a comparative analysis was made between the trained neural network and a fuzzy controller, which was used for training the ANN. The simulation results are shown in Fig. 14.
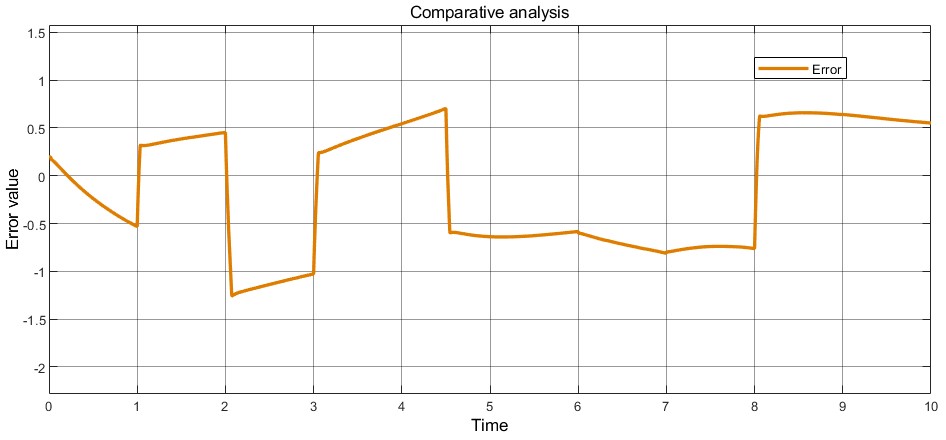
Figure 11. Absolute error between desired and current pitch angle
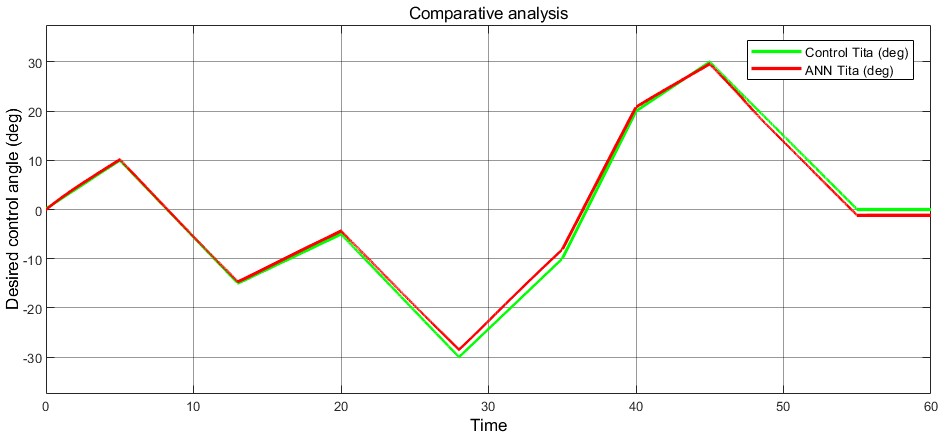
Figure 12. Analysis of ANN performance against the set steering angle for a period of 60 seconds
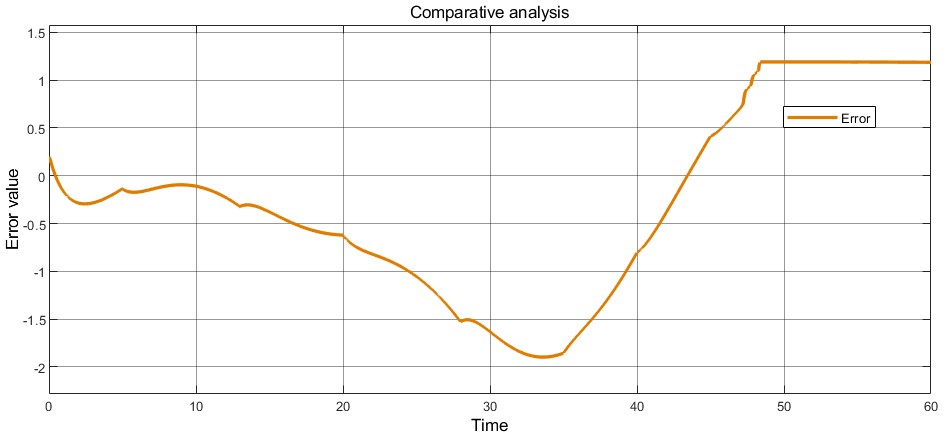
Figure 13. Absolute value validation error between angles Θ for a period of 60 seconds
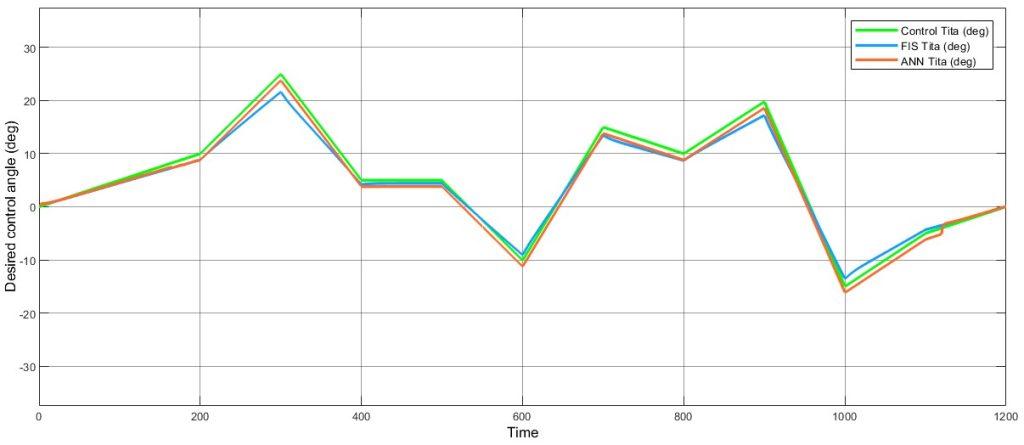
Figure 14. Results of a comparative analysis of the performance of ANN and FIS for a period of 20 min
Fig. 15 shows the results for the absolute error of the ANN relative to the desired control and relative to the performance of the training controller data.
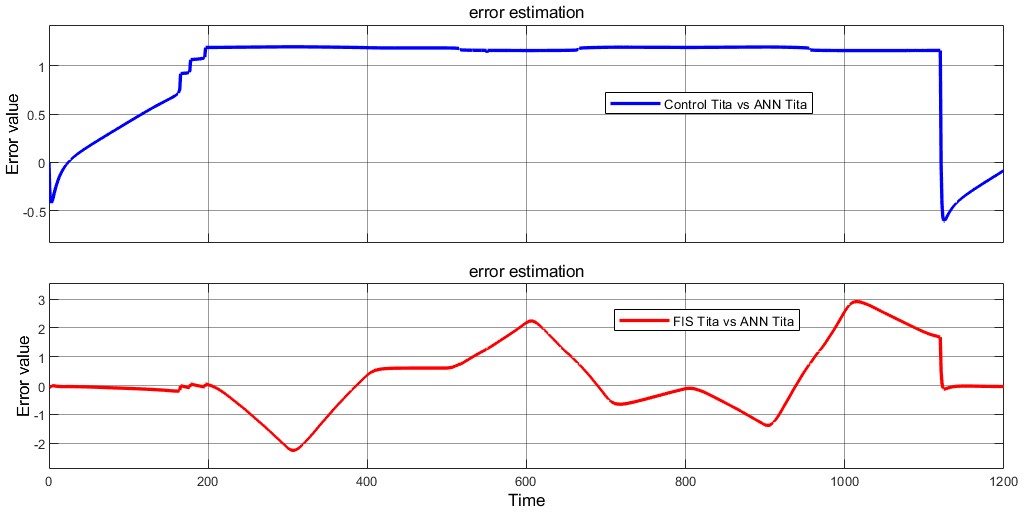
Figure 15. The absolute error values of the ANN relative to the desired Θ and of the FIS control
- Conclusions
- An artificial neural network was synthesized and trained using the MATLAB/Simulink environment and a fuzzy logic controller.
- The results of longitudinal motion control have been validated through simulations with different signals.
- When training the neural network with data for a period of 10 seconds, successful simulation control of the longitudinal motion of the UAV was achieved for a period of 20 minutes.
- An artificial neural network works with small deviations from the desired values.
Acknowledgement
The research in this article is carried out in fulfilment of Task 1.2.3. “Research on robotic and machine learning-based systems for environmental analysis and decision-making, and prototype development” by the National Scientific Program “Security and Defense”, adopted by RMS No. 731 of 21.10.2021. and according to Agreement No. D01-74/19.05.2022.
Araujo-Estrada, S., Windsor, S. (2020). Artificial Neural Network-Based Flight Control Using Distributed Sensors on Fixed-Wing Unmanned Aerial Vehicles. AIAA Scitech 2020 Forum. https://doi.org/10.2514/6.2020-1485.
Bakshi, N., Ramachandran, R. (2016). Indirect model reference adaptive control of quadrotor UAVs using neural networks. 10th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India. https://doi.org/10.1109/ISCO.2016.7727123.
Boudjit, K., Larbes, C., Ramzan, N. (2018). ANN design and implementation for real-time object tracking using quadrotor AR. Drone 2.0. Journal of Experimental & Theoretical Artificial Intelligence, 30(6), 1013 – 1035. https://doi.org/10.1080/0952813X.2018.1509896.
Calovska, R., Genchev, A., Biliderov, S. (2023). Synthesizing and study a fuzzy control system for the longitudinal motion of an unmanned aerial vehicle. AIP Conference Proceedings, 3063, 040003. https://doi.org/10.1063/5.0196216.
Draganova, T., Daskalov, P., Tsonev, R. (2010). An Approach for Identifying of Fusarium Infected Maize Grains by Spectral Analysis in the Visible and Near Infrared Region, SIMCA Models, Parametric and Neural Classifiers. International Journal Bioautomotion, 14(2), 119 – 128.
Gu, W., Valavanis, K., Rutherford, M., Rizzo, A. (2020). UAV Model-based Flight Control with Artificial Neural Networks: A Survey. Journal of Intelligent & Robotic Systems, 100(3–4), 1469 – 1491. https://doi.org/10.1007/s10846-020-01227-8.
Muliadi, J., Kusumoputro, B. (2018). Neural Network Control System of UAV Altitude Dynamics and Its Comparison with the PID Control System. Journal of Advanced Transportation, 1 – 18. https://doi.org/10.1155/2018/3823201.
Nikolov, S., Dimitrova, R., Dimitrov, S. (2022). Using of 3D Printing Technologies in the Manufacture of Mechatronic Products. 3th National Conference with International Participation (ELECTRONICA), Sofia, Bulgaria. https://doi.org/10.1109/ELECTRONICA55578.2022.9874404.
Patel, S., Sarabakha, A., Kircali, D., Loianno, G., Kayacan, E. (2019). Artificial Neural Network-Assisted Controller for Fast and Agile UAV Flight: Onboard Implementation and Experimental Results. Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), Cranfield, United Kingdom, 37 – 43. https://doi.org/10.1109/REDUAS47371.2019.8999677.
Petrov, M., Ganchev, I., Taneva, A. (2002). Fuzzy PID control of nonlinear plants. Proceedings First International IEEE Symposium Intelligent Systems, Varna, Bulgaria, 30 – 35. https://doi.org/10.1109/IS.2002.1044224.
Tianchun, L., Li, X., Wu, Y., Shan, X. (2023). Large Angle of Attack Prediction for Tail-Sitter Using ANN-Based Flush Air Data Sensing. In L. Yan, H. Duan, Y. Deng. (Eds.) Advances in Guidance, Navigation and Control. Lecture Notes in Electrical Engineering, 845 (pp. 6722 – 6731. https://doi.org/10.1007/978-981-19-6613-2_648.
Totev, D., Dimitrova, R., Dimitrov, S. (2024). Main steps in the process of upgrade of existing systems for automation and control of industrial and manufacturing processes in order to fulfill the requirements of the concept ‘Industry 4.0’. AIP Conference Proceedings, 3063, 060007. https://doi.org/10.1063/5.0195885.
Xin, G.-C., Chen, W.-L. (2017). Dynamic inversion control of UAV using ANN. In: Advances in Engineering Research. https://doi.org/10.2991/eeeis-16.2017.97.
Assis. Prof. Radostina Calovska
ORCID iD: 0009-0009-9102-5871
Scopus Author ID: 58947145000
Bulgarian Air Force Academy “Georgi Benkovski”
Dolna Mitropolia, Bulgaria
E-mail: rcalovska@af-acad.bg
Assoc. Prof. Stefan Biliderov, PhD
ORCID iD: 0000-0001-8739-234X
Scopus Author ID: 57211746835
Bulgarian Air Force Academy “Georgi Benkovski”
Dolna Mitropolia, Bulgaria
E-mail: sbiliderov@af-acad.bg

Свързани статии:
 Sociolinguistic Credo of a Foreign Language Teacher: The Case of Digital Classroom
RESULTS OF A STUDY OF THE AGGRESSIVE ATTITUDES AND EMOTIONAL STATE OF THE STUDENTS OF SOFIA UNIVERSITY “ST. KLIMENT OHRIDSKIˮ AND MEDICAL COLLEGE “Y. FILARETOVA”
Development and Integration of Audio and Visual Micro-Resources in the Learning Process through the Use of Artificial Intelligence Systems
Да навлезем в науката с игри
Sociolinguistic Credo of a Foreign Language Teacher: The Case of Digital Classroom
RESULTS OF A STUDY OF THE AGGRESSIVE ATTITUDES AND EMOTIONAL STATE OF THE STUDENTS OF SOFIA UNIVERSITY “ST. KLIMENT OHRIDSKIˮ AND MEDICAL COLLEGE “Y. FILARETOVA”
Development and Integration of Audio and Visual Micro-Resources in the Learning Process through the Use of Artificial Intelligence Systems
Да навлезем в науката с игри

