Stiliyan Nikolov
ORCID iD: 0000-0002-2485-3847
Web of Science Researcher ID: ACY-7901-2022
Technical University of Sofia, Bulgaria
Boryan Vladimirov
Technical University of Sofia, Bulgaria
https://doi.org/10.53656/adpe-2025.06
Pages 65-73
Abstract. Robotic cells are production cells specialized in the processing of a specific group of products. With the introduction of CARC systems into engineering practice, it became possible to use these systems not only for programming industrial robots, but also in the design of robotic production cells. The article examines the capabilities of the CARC system ROBOGUIDE for designing variants for robotic cells for performing “Pick and Place” operations. The main steps for evaluating the generated variants and selecting the optimal one are defined. Example of using the defined steps is given.
Keywords: CARC system; ROBOGUIDE; FANUC; robotic cells; “Pick and Place”
- Introduction
Robotic cells are production cells specialized in the processing of a specific group of products that are of similar design and medium-volume production programs (Dimitrova et al., 2019; Mitev, 2024).
Despite the wide variety of technological operations performed by robotic cells, the main stages in their design are (Vassilev & Komarski, 2024; Malakov & Zaharinov, 2021; Coletta & Chauhan 2022):
- Assessment of the objects according possibility for robotic production.
- Selection of components and configurations of the robotic cell.
- Modeling, research and determination of cell’s characteristics.
- Synchronization of the operation of cell components.
- Development of design documentation.
- Manufacturing, assembly, programming and adjustment of the cell.
- Conducting functional tests and implementation in practice.
With the increasing complexity of the operations performed by industrial robots and the development of computer technology, systems for offline programming of industrial robots, known as CARC (Computer Aided Robot Control) systems, are becoming a standard tool for engineering practice (Rengevic & Kumicakova, 2016). These systems are constantly evolving, and in addition to developing programs for industrial robots, they provide their users with the opportunity to include industrial robots in the structure of various robotic cells (Bulej et al., 2021; Biliderov et al., 2020; Jones et al., 2012; Marônek et al., 2015).
This paper examines the possibilities that CARC systems provide to users for developing robotic cells. An example of using the ROBOGUIDE system from FANUC to perform “Pick and Place” operations is given.
- Task statement
Considering the main stages in the design of robotic cells mentioned above, the possibilities for using CARC systems in this process are:
- Selection of components and configurations of the robotic cell.
- Modeling, research and determination of cell’s characteristics.
- Synchronization of the operation of cell components.
- Manufacturing, assembly, programming and adjustment of the cell.
To demonstrate these capabilities, the design of a robotic cell for palletizing cartons with dimensions of 300x250x200 [mm] and a weight of 5 [kg], in four rows on euro pallets EUR 2 1200×1000 [mm] will be considered.
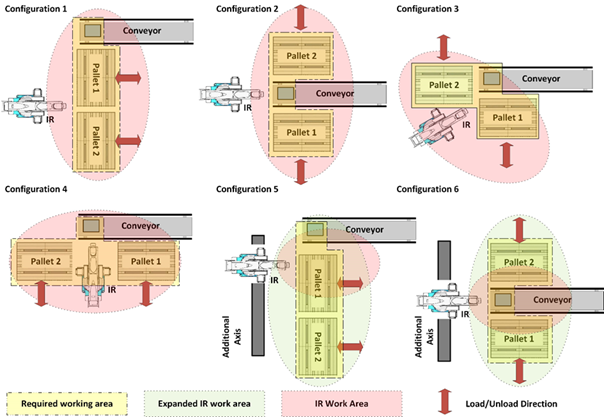
Figure 1. Cell's configurations
Figure 1 shows six possible configurations of the designed cell, taking into account the dimensions of the working area of the industrial robot used. The cell includes the following main components:
- Conveyor – delivers the cartons to the robotic palletizing cell.
- Industrial robot – arranges the cartons on the pallets.
- Pallets – define the area for arranging the cartons.
- Additional axis – provides an expansion of the working area of the industrial robot.
The individual components of the robotic cell operate in the following sequence:
- The industrial robot takes the cartons arriving on the conveyor and stacks them on Pallet 1.
- After Pallet 1 is filled (4 by 4 cartons in a row, with 4 stacking rows), the stacking of the cartons on Pallet 2 begins.
- While the industrial robot stacks the cartons on Pallet 2, Pallet 1 with the cartons stacked on it is taken out of the cell and an empty one is placed in its position.
- After Pallet 2 is filled (4 by 4 cartons in a single level, with 4 stacking levels), the stacking of the cartons on Pallet 1 begins.
- While the industrial robot stacks the cartons on Pallet 1, Pallet 2 with the cartons stacked on it is taken out of the cell and an empty one is placed in its position.
- Steps (2) to (5) are repeated until cartons arrive on the conveyor.
The following constraints must be observed when designing the cell:
- The position of the conveyor cannot be changed.
- The direction of removal of the pallets from the cage can be parallel or perpendicular to the conveyor.
The following criteria should be used to evaluate the different configurations:
- Productivity;
- Area occupied.
- Price.
- 3. Design of a robotic cell to perform “Pick and Place” operations in the ROBOGUIDE environment
The main steps in designing robotic cells in the environment of a CARC system are:
- Choosing an industrial robot
The choice of an industrial robot depends on the mass of the manipulated object. For this purpose, the library with 3D models of industrial robots included in the system is used. Part of this choice is also the choice of a controller that will be used to generate the program according to which the robot will operate.
- End effector selection
The selection of an end effector depends on the mass, shape and dimensions of the manipulated object or the technological operation being performed. For this purpose, the library of 3D models of end effectors included in the system or user-created 3D models can be used.
- Component Selection
The selection of components depends on the variant of the robotic cell to be designed. The 3D models of the components can be taken from the system library, if available, or created by the user using a CAD system.
The result of performing these steps when developing configuration 1 from Fig.1 using ROBOGUIDE, for the designed robotic cell is shown in Fig. 2.
A Fanuc R-2000iC/165F robot with a load capacity of 165 [kg] and a reach of 2655 [mm] was selected to perform the operation.
A vacuum gripper is used to manipulate the cartons.
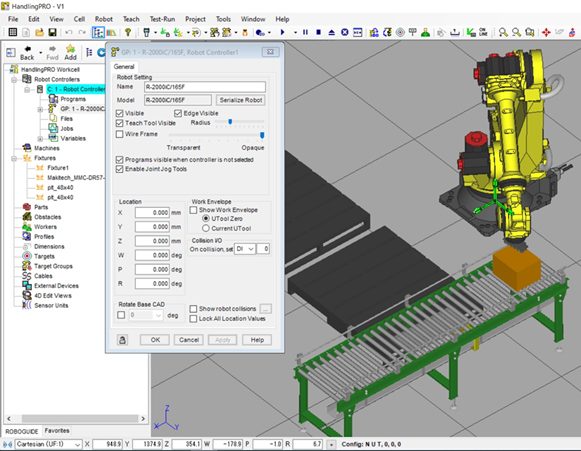
Figure 2. Configuration 1 of the designed cell
The result of performing these steps when developing configuration 5 from Fig.1 using ROBOGUIDE, for the designed robotic cell is shown in Fig. 3.
A Fanuc M10iD/8L robot with a load capacity of 8 [kg] and a reach of 2023 [mm] was selected to perform the operation. An additional linear axis IP-150-RA from IPR Robotics with a length of 3 [m] was used to expand the robot’s working area.
A vacuum gripper was used to manipulate the cartons.
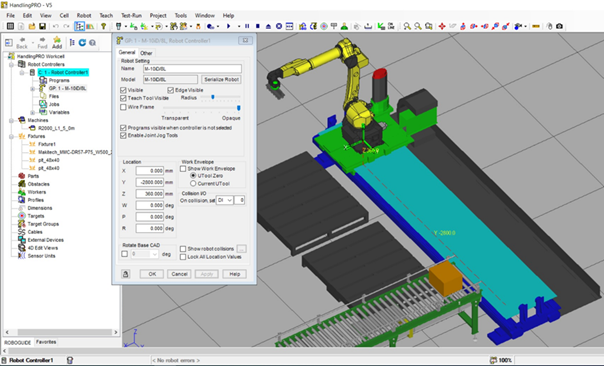
Figure 3. Configuration 5 of the designed cell
Steps (1) to (3) are repeated until all configurations for the designed robotic cell are developed.
The positioning of the components is done relative to the robot’s Reference Frame or World Reference Frame, as it will be used when programming the robot.
- Analysis of the developed configurations
The analysis of the developed configurations includes an assessment of the capabilities of the selected industrial robot to perform the necessary operations with the specific arrangement of the cell components. If necessary, the robot can be replaced with another or an additional axis of mobility can be added to expand its working area.
The result of performing this step for the configurations in Fig.1 using ROBOGUIDE, for the designed robotic cell is shown in Fig.4.
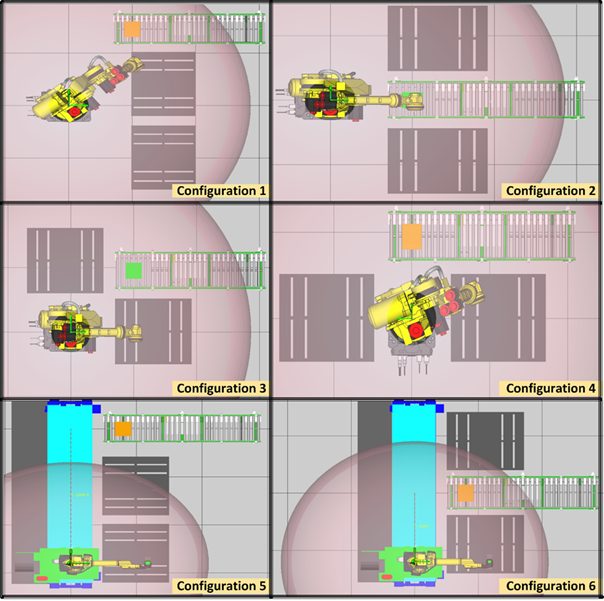
Figure 4. Analysis of the developed configurations in the ROBOGUIDE environment
The result of the analysis shows that the maximum dimensions of the work areas of the robots selected in step (3) allow the performance of the necessary operations.
- Selection of the cell’s configuration
With the tools provided by the CARC system, the operation of the designed cell is simulated and the characteristics of the developed configurations are determined.
During simulation of operation of cell configuration 4, an incompatibility of the robot’s working area with one of the cartons stacking positions is detected.
To solve the problem, it is necessary to change the positions of the pallets relative to the robot, which leads to an increase in the area of the cage and the time for stacking the cartons Fig.5.
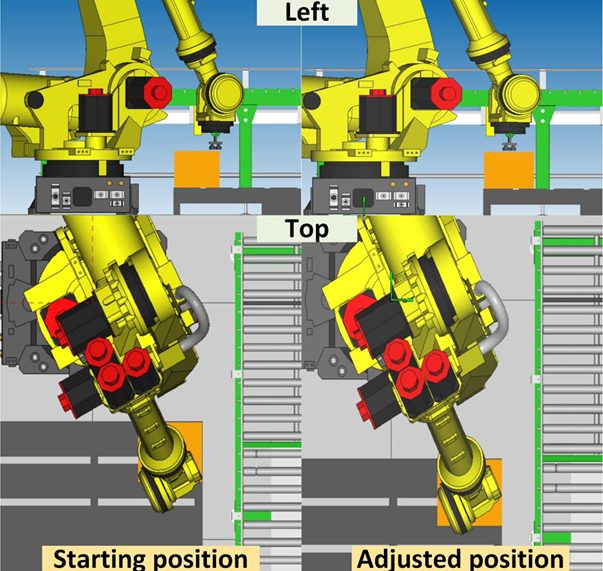
Figure 5. Result of analysis of cell's configuration 4
The determined characteristics of the configurations from Fig.1 using ROBOGUIDE, according to the criteria given in the assignment, for the designed robotic cell are given in Table I.
Table 1. Characteristics of the configurations
| Configuration | Time to stack the cartons [min] | Total area [m2] | Price | ||
| Pallet 1 | Pallet 2 | Total | |||
| 1 | 7.58 | 10.91 | 18.49 | 7 | 1 |
| 2 | 7.58 | 7.58 | 15.16 | 8 | 1 |
| 3 | 7.58 | 7.48 | 15.06 | 6 | 0,92 |
| 4 | 10.78 | 10.78 | 21.56 | 9 | 0,93 |
| 5 | 4.86 | 6.20 | 11.06 | 11 | 0,77 |
| 6 | 4.86 | 4.86 | 9.72 | 11 | 0,77 |
The data on the price of the cell are relative, with 1 being the price of configuration 1. The price includes the price of: the industrial robot, the additional axis of movement and the safety fences.
The data in Table I show that according to the accepted criteria:
- with the shortest time for arranging the boxes on the two pallets (the highest productivity is configuration 6 – 9.72 [min];
- with the smallest area occupied is configuration 1 7 [m2];
- with the lowest price are configurations 5 and 6.
Based on these data, configuration 6 is optimal, which is selected for use in the next design stages.
- Conclusions
The main steps in designing robotic cells using CARC systems are defined.
These steps are applied in designing a robotic cell for palletizing in the ROBOGUIDE environment. As a result, six configurations of the designed cell were developed. Using ROBOGUIDE, characteristics were determined and used to evaluate the configurations. Based on the evaluation, an optimal variant of the designed cell was selected, according to the criteria of the assignment.
The results obtained show that modern CARC systems are a powerful tool not only for programming industrial robots, but also for designing robotic cells.
The steps defined in this work are universal and can be used when working with different CARC systems.
Acknowledgement
This research was funded by the Research and Development Sector at the Technical University of Sofia. The authors thank the Research and Development Sector at the Technical University of Sofia for their financial support.
REFERENCES
Bulej, V., Bartoš, M., Tlach, V., Bohušík, M., Wiecek, D. (2021). Simulation of manipulation task using iRVision aided robot control in Fanuc RoboGuide software. IOP Conference Series: Materials Science and Engineering, 1199. https://doi.org/10.1088/1757-899X/1199/1/012091.
Biliderov, S., Kambushev, M., Kambushev, K., Marinov, A., Dimitrova, R. (2020). Recovery of GPS Disability to Unmanned Aircrafts by System Modeling. 29th International Scientific Conference Electronics (ET). https://doi.org/10.1109/ET50336.2020.9238254.
Coletta, J., Chauhan, V. (2022). Teaching Industrial Robot Programming using FANUC ROBOGUIDE and iRVision Software. Proceedings of the 16th International Multi-Conference on Society, Cybernetics and Informatics (IMSCI 2022), 45 – 50. https://doi.org/10.54808/IMSCI2022.01.45.
Dimitrova, R., Zhmud, V., Petrov, N., Vakarelska, T. (2019). Study accuracy of a transportation system positioning of a test rig for automated mounting of luster terminals. IOP Conference Series: Materials Science and Engineering, 659, (1). https://doi.org/10.1088/1757-899X/659/1/012031.
Jones, J., G. Leaney, P., Harland, A., Forrester, S. (2012). Validation of RoboGuide to Support the Emulation of Sporting Movements using an Industrial Robot. Procedia Engineering, 34, 307 – 312. https://doi.org/10.1016/j.proeng.2012.04.053.
Marônek, M., Bárta, J., Ertel, J. (2015). Inaccuracies of Industrial Robot Positioning and Methods of Their Correction. Tehnički vjesnik, 22(5), 1207 – 1212. https://doi.org/10.17559/TV-20140416123902.
Malakov, I., Zaharinov, V. (2021). Choosing an Optimal Size Range of the Product “Pipe Clamp”. In R. Matoušek, J. Kudela (Eds), Recent Advances in Soft Computing and Cybernetics (pp. 197-213). https://doi.org/10.1007/978-3-030-61659-5_17.
Mitev, P. (2024). Development of a System for the Active Orientation of Small Screws. Engineering Proceedings, 70(1), 55. https://doi.org/10.3390/engproc2024070055.
Rengevic, A., Kumicakova, D. (2016). New Possibilities of Robot Arm Motion Simulation. Communications – Scientific Letters of the University of Zilina, 18(11), 81 – 86. https://doi.org/10.26552/com.C.2016.1A.81-86.
Vassilev, V., Komarski, D. (2024). Retrofit of a roundness measuring instrument. 34th International Scientific Symposium Metrology and Metrology Assurance, 1 – 5. https://doi.org/10.1109/MMA62616.2024.10817687.

